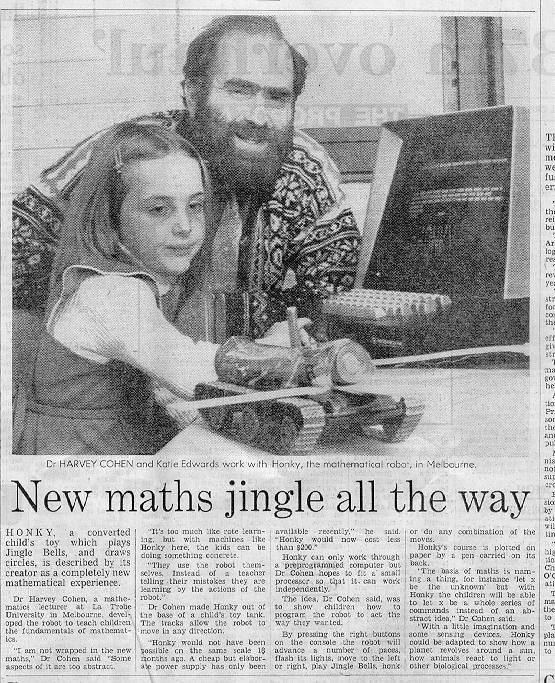
Story in the Australian, 1975.
The initial implementation of the OzNAKI educational robotics languages was on the La Trobe University PDP-10 "mainframe". The very first implementations were in Algol-60, augmented by machine code to output ASCII control codes to the ZONKY (originally called Honky) robot. Together with research student Rhys Francis a scheme of developing portable code was developed in terms of macros, allowing subsequent implementations to be tested on a DEC-10 and produce machine code for a range of microprocessors, including the Intel 8080, Mototola 6800, SC/MP, and 6502 ( for the Apple ][ ). This system was described in an article published in the IEEE Computer
Using a conventional macro-assembler as a multi-target cross-assembler and cross-compiler, the authors developed portable algorithmic code for OZNAKI,
Other engineering aspects of OzNAKI are described here
Three key papers on the educational aspects of OZNAKI are downloadable as PDFs
|
| Harvey A. Cohen, OZNAKI and Beyond, [U.S.] National Educational Computing Conference H.A. Cohen, OZNAKI and BEYOND, in D. Harris (Editor), Proceedings of National Education Computing Conference, NECC '79 The University of Iowa, Iowa, June 1979, pp 170-178. |
|
| Harvey A. Cohen and David G. Green, Evaluation of the Cognitive Goals of OZNAKI: Enhancement of Spatial Projective Abilities, in A.M. Wildberger and R. G. Montanelli, (Editors), "ACM Topics in Instructional Computing"' ACM Special Interest Group Computers in Education, SIGCUE, New York, 1978, pp 69-90 |
| H.A. Cohen, Expanding the Child's Concept of Number, Space and Operation, in M. Poole (Editor), From Creativity to Curriculum, Allen and Unwin, Sydney, 1980, pp 147-162. |